<
<
<

Les concepteurs de robot ont souvent cherché à imiter le vivant et à recréer artificiellement des fonctions existantes dans le monde vivant. La marche fait partie des fonctions qu’il est fascinant de voir réaliser par des machines car c'est habituellement l’apanage du vivant. N’ayant pas les connaissances pour m’attaquer au déplacement des bipèdes je me suis intéressé au moyen de locomotion des insectes, sur six pattes, mon robot étant ainsi toujours en appui sur le sol de façon isostatique. Mon travail a débuté en 1998 lorsque j’ai vu dans un concours de robotique à Loures au Portugal où je concourais avec mon IUT les robots de l'IUT de Nantes. Cette école a produit de très belles machines dont un bipède et un hexapode. Je tiens à les remercier pour l’inspiration qu’ils m'ont fournie.
.Mon robot a été présenté au Festival International des Sciences et Techniques de Bourges en 1999 où il à obtenu le prix Eurêka.
Fonctionnement
Ce robot marcheur possède 6 pattes ayant chacune un degré de liberté. La bonne synchronisation des pattes étant assurée par une carte à relais qui se charge de déclencher les moteurs dans le bon sens et de les arrêter à temps pour que la démarche du robot soit la plus parfaite possible. De fait cette carte nous simplifie grandement le travail, elle possède 4 entrées correspondant aux ordres des 4 mouvements. Ce sont ces entrées que nous relierons à un automate programmable (voir liens), un PC ou un système de radio commande.
Le mode de marche adopté ici est celle dite du trépied alterné, les 6 pattes forment deux trepieds qui permettent au robot d'être constamment en appuis isostatiques sur le sol. Les 3 pattes du même trepied sont toujours dans la même position, elles le quittent simultanément et le retrouvent ensemble. De fait le robot se gère comme un véhicule à chenille, pour avancer on lance les 2 cotés dans le même sens, pour un demi tour on met un côté dans un sens et l' autre dans le sens inverse, pour un virage on ne met en fonctionnement qu' un seul côté et le robot tourne autour des pattes immobiles. Ce robot peut ainsi effectuer 6 pas différents.


 Une petite étude cinématique des pattes est accessible içi en PDF
Une petite étude cinématique des pattes est accessible içi en PDF
Le chassis
Le châssis sera constitué de sept parties taillées dans des plaques de circuit imprimé double face qui seront assemblées par soudage. L’intérêt de ce matériau est qu’il est rigide, dur, facile à assembler, et que sa surface cuivrée permet de réaliser des zones de frottement de qualité, à même le châssis, chose impossible sur du bois. En contrepartie il est plus cher et plus lourd que le bois. Le premier châssis que j'ai réalisé était en bois et était néanmoins convenable Si vous voulez réaliser le châssis en bois faites le dans un contre plaqué de 3 ou 4 mm. La réalisation de ces pièces n’appelle pas à commentaire si ce n’est concernant l’entraxe des engrenages qui doit respecter les cotes sans quoi les pattes présenteraient un jeu trop important qui nuirait à leur bon fonctionnement.
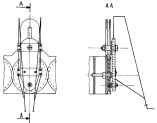
Les pattes
Les pattes sont réalisées en corde à piano de 2mm pliées et reliées aux plaques motrices par des inserts de dominos brasés sur des languettes métalliques elles-mêmes vissées sur les plaques motrices en bois, Il est ainsi possible de régler la hauteur des pattes en desserrant les dominos et en faisant coulisser les pattes dans leurs supports. Les pattes ainsi réalisées sont peu chères, très légères mais néanmoins solides. J'ai depuis fabriqué des pattes en tôle d' alu plié qui sont monoblocs plus esthétiques et plus solides.
.

Les moteurs
Les moteurs proviennent du catalogue Conrad électronique.
(http://www.conrad.fr/) Il s’agit de moteur de format 540 avec réducteurs incorporés vendus moins de 100 francs. Il est certainement possible de trouver un produit équivalent dans les boutiques de modèles réduit. Sous 7.2 V ils tournent à 130 tr/min et consomment sur mon robot 0.8A chacun. [ dimensions : Æ 37 mm, longueur sans arbre 87 mm, arbre Æ 6 mm et 17 mm de long - poids 275 g. Couple : 7Kg/cm.]
Les engrenages

Les engrenages présents sur mon robot ont été trouvés dans un catalogue de fournitures scolaires Allemand peu connu (Sté OPITEC, il existe un site). On les trouve également chez Gotronic. Il s'agit de roue dentée en PVC d’un diamètre de 60mm de module 1, ce qui fait 58 dents, vendu 8.5fr les 10. La encore certaines boutiques de modèle réduit vendent des produits similaires. Des pièces détachées LEGO ou MECANO peuvent également faire merveille.
La carte de synchronisation

Cette carte a pour fonction de synchroniser les pattes entre elles et de gérer la
locomotion du robot. Elle utilise pour cela deux relais par moteur, monté l'un derrière l'autre. Le premier assure la synchronisation des pattes en alimentant ou non le moteur en fonction des informations qu'il reçoit du capteur de fin de mouvement de chaque triplette de patte. De cette façon, si des pattes terminent leur mouvement avant les autres elles doivent attendrent l'arrivé de celles-ci pour repartir. Les deuxièmes relais sont eux chargés d'inverser ou non la polarité aux bornes des moteurs pour effectuer un pas en arrière ou un virage.Cette carte est particulierement simple dans son principe même si elle peut paraître fouillie de prime abord. Elle ne comporte que des relais 2RT, des diodes de redressement type 1N4004 et des condensateurs de 100nF. On peut la réaliser grace à une plaque à bande ou par photogravure, c'est au choix. Il est certain que la fonction de cette carte peut-etre assuré par un automate si vous en utilisez un, cependant puisque le robot ne sait pas se déplacer sans qu'un système n'assure la synchronisation de ses pattes il est pratique de réaliser cette carte de sorte que l'on dispose ainsi d'un robot "prêt à l'emploi" qui n'attend plus que des impulsions de 5v sur ses entrées (Av Ar G D) pour se déplacer. Sur mon modèle j'ai connecté une carte radio et une carte à microcontrôleur à ces entrées.
Je n'ai pas mis sur ce site le typon de cette carte car j'ai fait les circuits imprimés au feutre et que par conséquent je ne dispose pas de typon présentable. Par ailleur je pense qu'il n'est pas plus mal que chacun puisse tracer ses circuits personnels sutout quand ils sont simples comme ici. Lancez-vous !!

Les capteurs de fin de mouvement dont il est question sont de simples rupteurs fermés par les écrous de la liaison glissière, quand ils arrivent au point mort bas. Pour assurer un décalage d'un demis-tour entre chaque rangée de patte on en disposera un sur une patte arrière et un sur une patte du milieu.
Cette carte de gestion des moteurs fonctionne très bien sur mon robot depuis près de 4 ans mais elle est techniquement très primaire. Si ce robot vous interesse, je vous recommande de reconcevoir une carte plus évoluée (voir ci-dessous).

A l'occasion du concours Electronique pratique de novembre 2002 j'ai commencé avec le club de robotique de mon école d'ingénieur, la réalisation d'un deuxième marcheur. En effet il s'avère que celui-ci a exactement les cotes limites du règlement. Podibot II, c'est son nom, est en fait une évolution de Podibot I, mon premier marcheur. Il en reprend les grandes lignes améliorées là ou le premier avait des faiblesses.
.Le chassis sera cette fois en acier de 1mm d'épaisseur, sera plus large et constitué de moins de morceaux, la disposition des moteurs est différente afin de rendre le chassis plus habitable. Les moteurs seront les mêmes ainsi que les roues dentées et les pattes. Par contre l'électronique, point faible du premier robot sera constituée d'une carte de puissance et d'une carte principale de pilotage à base de µC 16F84 réalisée par mes collègues électroniciens.
. Le schéma de cette carte de commande est accessible ici


Gallerie photo d'autres robots inspirés des Podibots
|
|
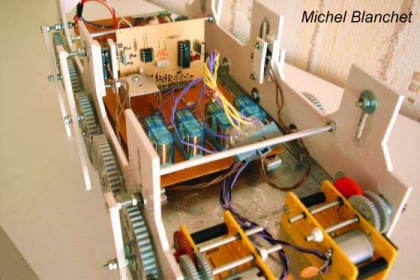
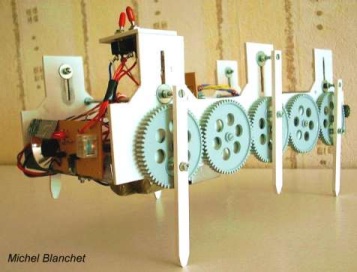
Ce robot à été réalisé par Michel Blanchet. Le chassis est en PVC et les moteurs sont plus raisonables que sur le mien
|
|
|
Ce robot a été réalisé par Logan.
|
Si vous avez des questions techniques ou besoin de précision vous pouvez m'écrire.
Cependant par manque de temps je ne pourrai pas :
Vérifier vos programmes, débugger vos montages, examiner vos schémas ou faire vos projets scolaires à votre place !
Par contre je réponds avec plaisir aux questions PRECISES et bien formulées.
![]()